


cambridge, ma
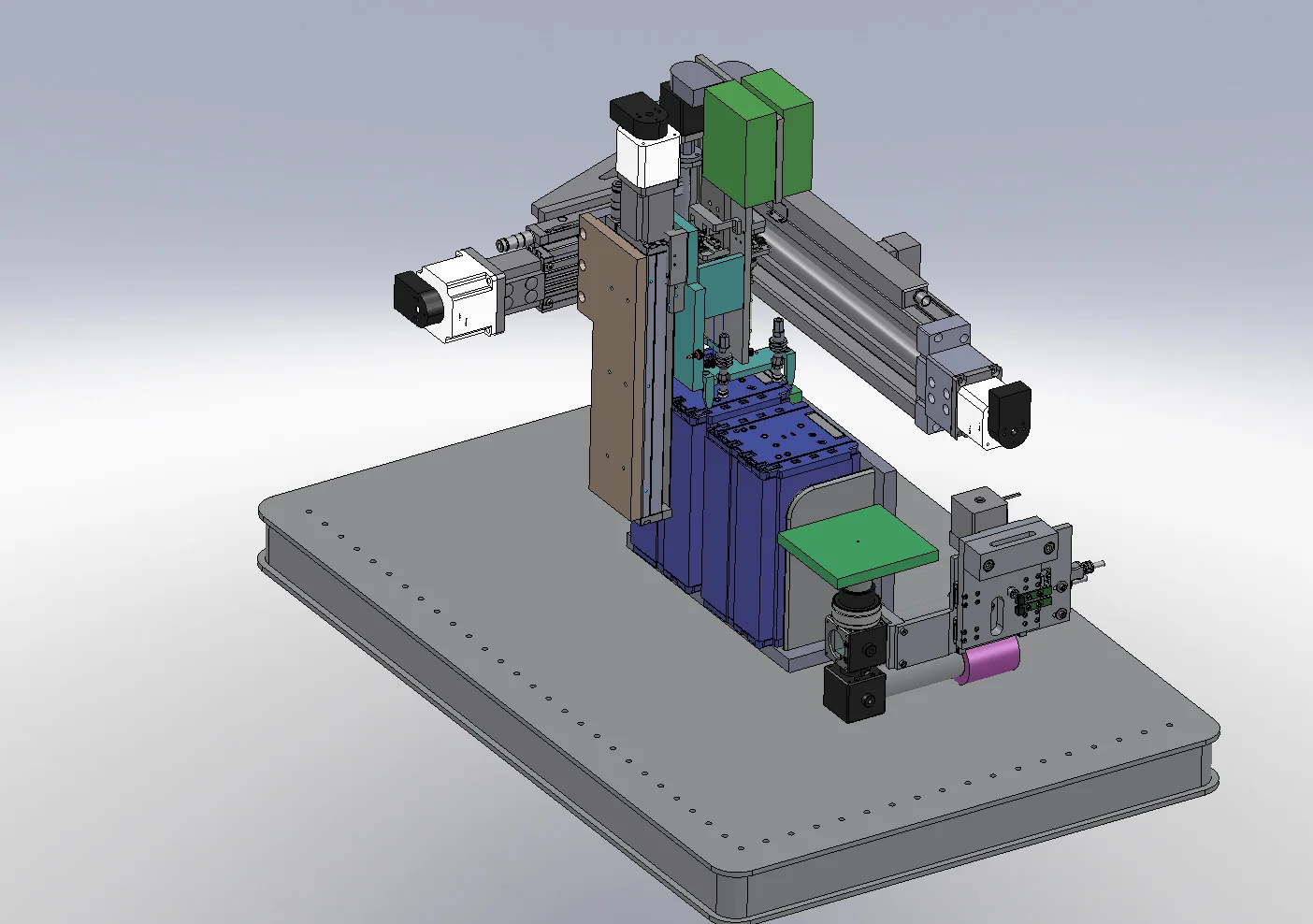
Work on this project included the design and testing of a robotic positioning system capable of reliably picking up, transporting, and releasing microfluidic cartridges. It needed to reliably make and break electrical, optical, mechanical, fluidic, and pneumatic connections to the chip.
Work on this project included the design and testing of a robotic positioning system capable of reliably picking up, transporting, and releasing microfluidic cartridges. It needed to reliably make and break electrical, optical, mechanical, fluidic, and pneumatic connections to the chip.